Robotyka & automatyka przemysłowa
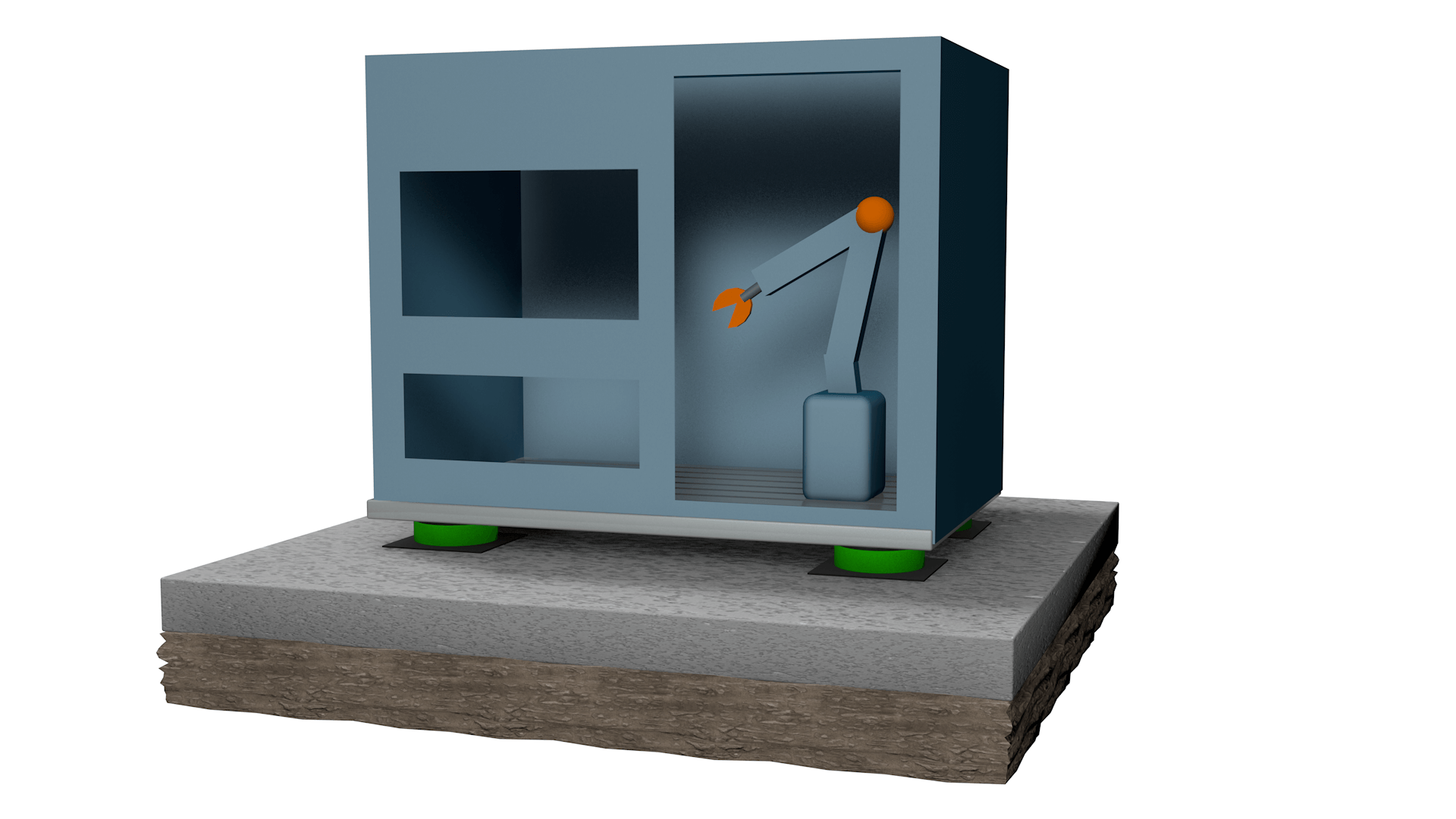
W przypadku robotów przemysłowych należy uwzględnić przede wszystkim dynamikę pracy robota oraz jego integrację w procesie produkcyjnym. Generalnie stosowana jest podstawowa zasada zastosowania wspólnej powierzchni (platformy) na której znajduje się stabilnie zamontowane ramię robota stanowiące „monolit z platformą” oraz powierzchnia robocza dla innego urządzenia współpracującego z robotem na jednej płaszczyźnie.Wspólna powierzchnia robocza w postaci płyty stalowej o dużej masie lub platformy stalowej ustawiana jest na wibroizoaltorach pneumatycznych z elektroniczną stabilizacją położenia EPN. Kontroler położenia platformy sterowany jest w czasie rzeczywistym przy pomocy sensorów elektronicznych.

W przypadku zmiennych przebiegów i dużej prędkości przemieszczania mas przewidziana jest opcja aktywnego systemu poduszek pneumatycznych oraz sterownika EPPC (tu odnośnik do produktu EPPC). Sterownik jest odpowiedzialny za przepływ powietrza według zadanych parametrów.
Rozwiązanie to jest kompatybilne z urządzeniami znanych producentów jak KUKA, ABB czy FANUC.
Ten post dostępny jest także w języku:
![]() Lietuvių (Litewski)
Lietuvių (Litewski) ![]() Eesti (Estoński)
Eesti (Estoński) ![]() Latviešu (łotewski)
Latviešu (łotewski) ![]() Русский (Rosyjski)
Русский (Rosyjski) ![]() Українська (Ukraiński)
Українська (Ukraiński) ![]() Belarussian (Białoruski)
Belarussian (Białoruski)
Realizacje







