Robotitehnika & Tööstusautomaatika
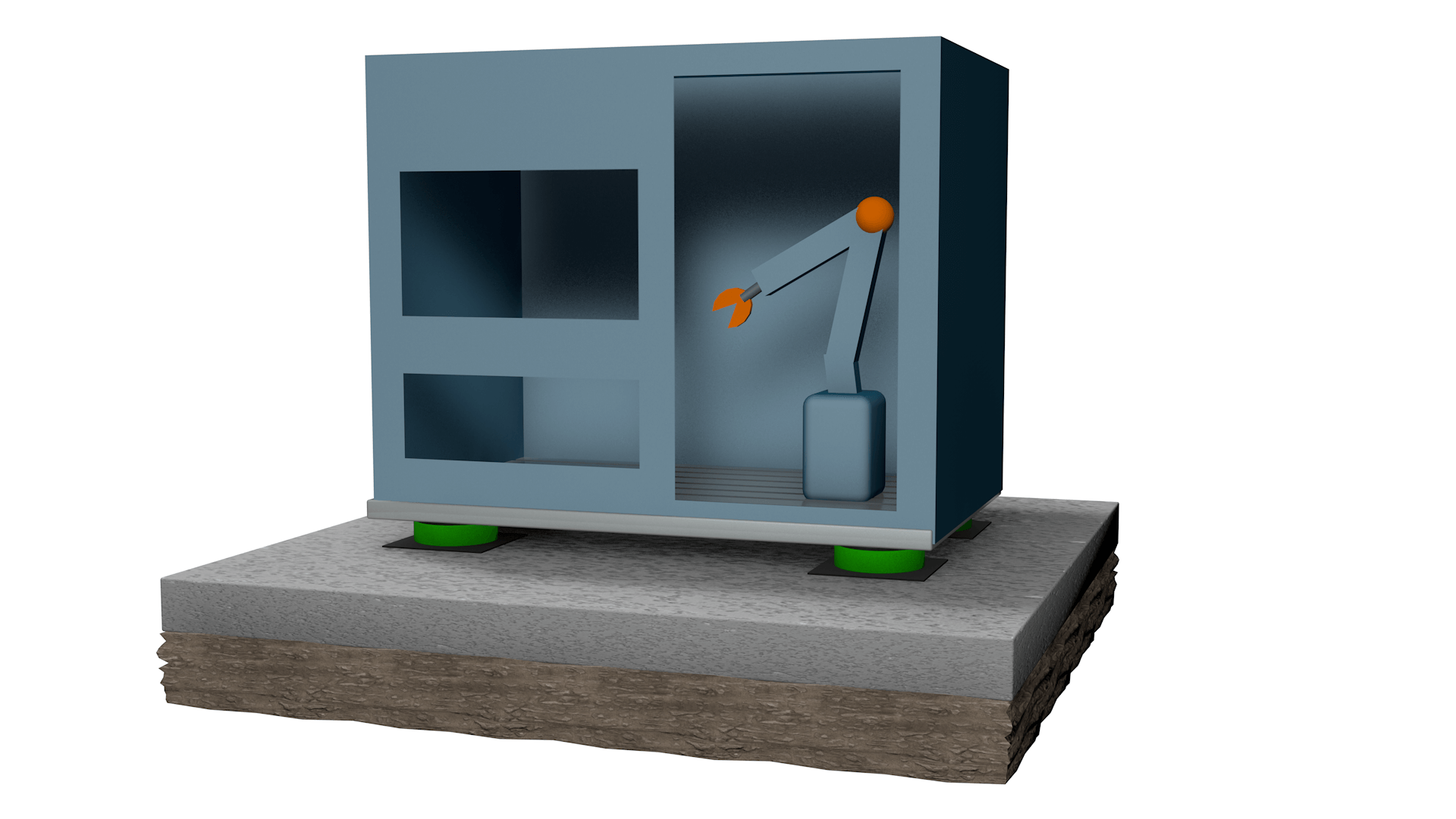
Tööstusrobotite puhul tuleb esmalt arvesse võtta roboti töö dünaamikat ja selle integreerimist tootmisprotsessi. Üldreeglina rakendatakse põhimõtet, et robotikäsi, mis on stabiilselt paigaldatud platvormile, moodustab „monoliidi platvormiga”, ning tööpind teise seadme jaoks, mis töötab robotiga samal tasapinnal. Ühine tööpind, mis koosneb suure massiga terasplaadist või terasplatvormist, paigaldatakse pneumaatilistele vibratsioonisolaatoritele, millel on elektrooniline positsiooni stabiliseerimine (EPN). Platvormi positsiooni kontrollitakse reaalajas elektrooniliste andurite abil.

Muutuva dünaamika ja suurte liikumiskiirustega masside puhul on ette nähtud pneumaatiliste patjade aktiivne süsteem ning EPPC kontroller (siin viide EPPC tootele). Kontroller vastutab õhuvoolu juhtimise eest vastavalt määratud parameetritele.
See lahendus ühildub tuntud tootjate seadmetega, nagu KUKA, ABB ja FANUC.
Ten post dostępny jest także w języku:
![]() Polski (Polish)
Polski (Polish) ![]() Lietuvių (Lithuanian)
Lietuvių (Lithuanian) ![]() Latviešu (Latvian)
Latviešu (Latvian) ![]() Русский (Russian)
Русский (Russian) ![]() Українська (Ukrainian)
Українська (Ukrainian) ![]() Belarussian
Belarussian