Robotika un rūpnieciskā automatizācija
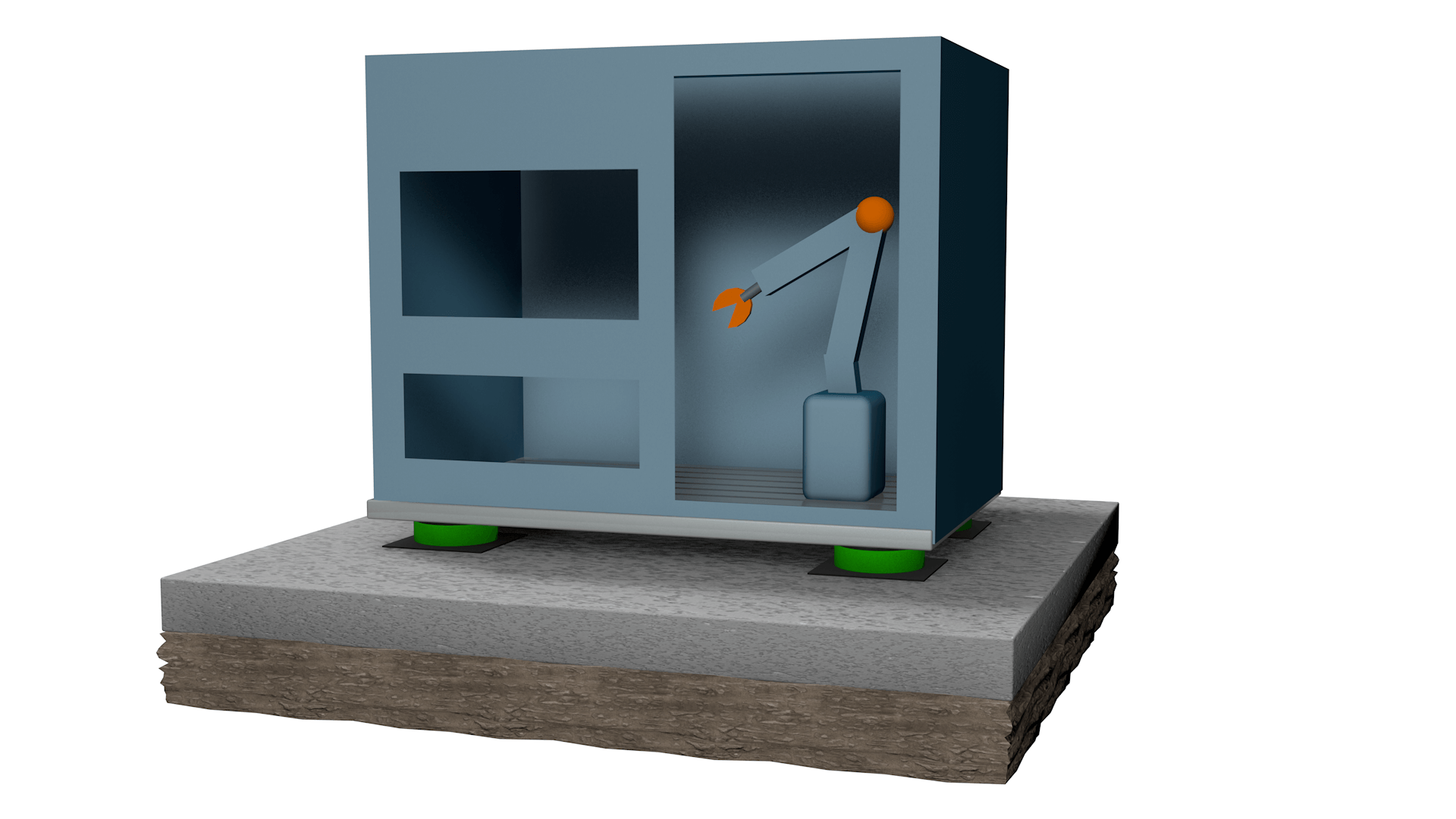
Rūpniecisko robotu gadījumā jāņem vērā galvenokārt robota darba dinamika un tā integrācija ražošanas procesā. Parasti tiek piemērots pamatprincips izmantot kopēju virsmu (platformu), uz kuras stabilā veidā ir uzstādīta robota roka, kas veido “monolītu ar platformu”, un darba virsma citai iekārtai, kas sadarbojas ar robotu vienā plaknē. Kopējā darba virsma tērauda plāksnes vai platformas veidā ar lielu masu tiek uzstādīta uz pneimatiskajiem vibrāciju izolatoriem ar elektronisko pozīcijas stabilizāciju EPN. Platformas pozīcijas kontrolieris tiek vadīts reāllaikā, izmantojot elektroniskos sensorus.

Mainīgu slodžu un lielu kustības ātrumu gadījumā tiek izmantota aktīvā pneimatisko spilvenu sistēma un EPPC kontrolieris (šeit saite uz produktu EPPC). Kontrolieris ir atbildīgs par gaisa plūsmu atbilstoši noteiktajiem parametriem.
Šis risinājums ir savietojams ar tādu pazīstamu ražotāju iekārtām kā KUKA, ABB vai FANUC.
Ten post dostępny jest także w języku:
![]() Polski (Polish)
Polski (Polish) ![]() Lietuvių (Lithuanian)
Lietuvių (Lithuanian) ![]() Eesti (Estonian)
Eesti (Estonian) ![]() Русский (Russian)
Русский (Russian) ![]() Українська (Ukrainian)
Українська (Ukrainian) ![]() Belarussian
Belarussian