Robotika ir pramonės automatika
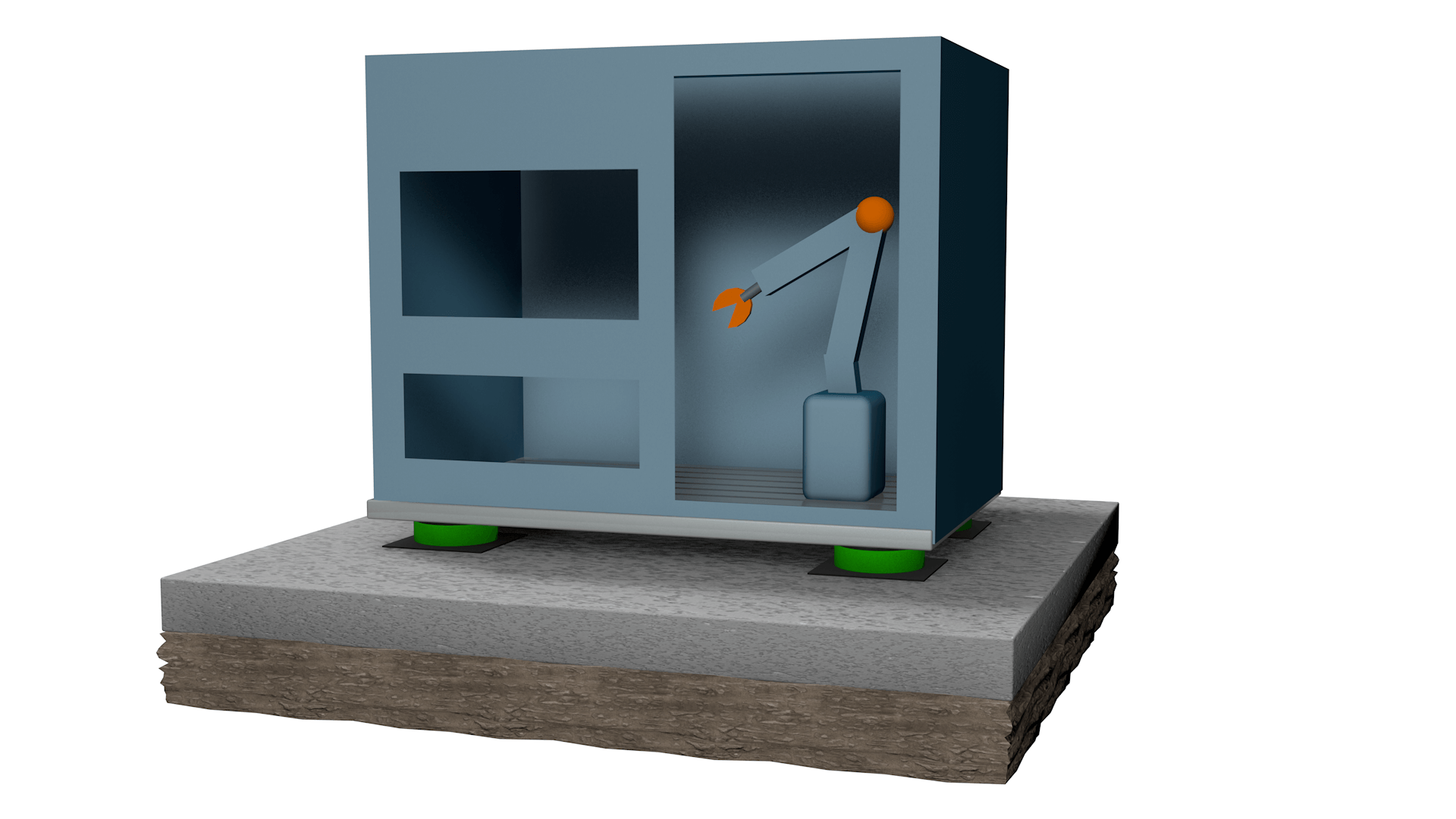
Pramoniniams robotams svarbiausia atsižvelgti į roboto darbo dinamiką ir jo integraciją į gamybos procesą. Paprastai taikoma pagrindinė taisyklė – bendra plokštuma (platforma), ant kurios stabiliai montuojama roboto ranka, sudaranti „monolitą su platforma“, ir darbo paviršius kitam įrenginiui, veikiančiam vienoje plokštumoje su robotu.
Bendra darbo plokštuma, sudaryta iš masyvios plieninės plokštės arba plieninės platformos, statoma ant pneumatinio vibroizoliavimo įrenginių su elektronine padėties stabilizavimo sistema EPN. Platformos padėtį realiuoju laiku valdo elektroniniai jutikliai.

Kintamiems procesams ir dideliam masių judėjimo greičiui numatyta aktyvi pneumatinio pagalvių sistema su EPPC valdikliu (čia nuoroda į EPPC produktą). Valdiklis atsakingas už oro srautų valdymą pagal nustatytus parametrus.
Šis sprendimas suderinamas su žinomų gamintojų įrenginiais, tokiais kaip KUKA, ABB ar FANUC.
Ten post dostępny jest także w języku:
![]() Polski (Polish)
Polski (Polish) ![]() Eesti (Estonian)
Eesti (Estonian) ![]() Latviešu (Latvian)
Latviešu (Latvian) ![]() Русский (Russian)
Русский (Russian) ![]() Українська (Ukrainian)
Українська (Ukrainian) ![]() Belarussian
Belarussian