Робототехника и промышленная автоматика
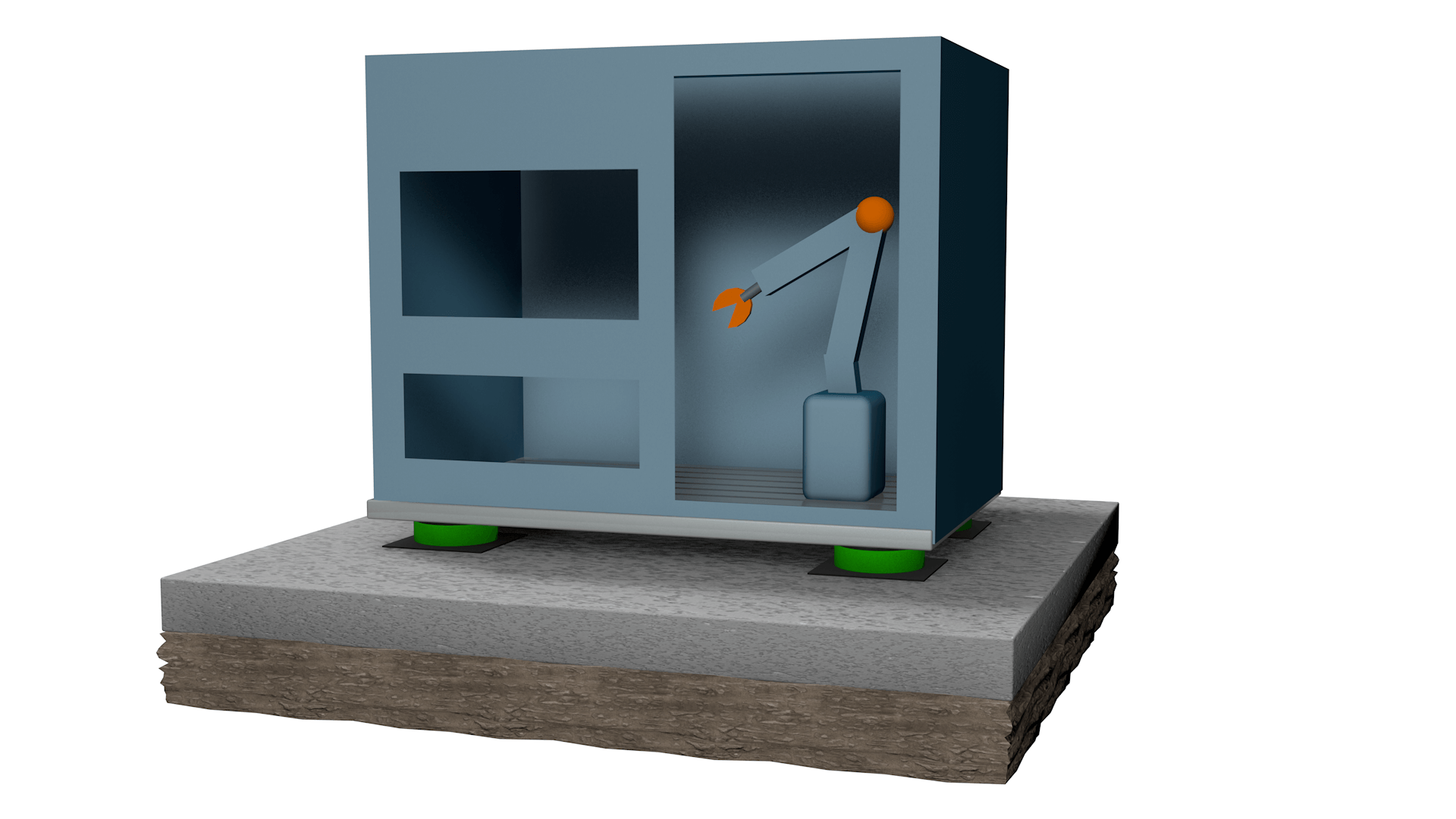
В случае промышленных роботов необходимо учитывать, прежде всего, динамику работы робота и его интеграцию в производственный процесс. Основным правилом является использование общей поверхности (платформы), на которой стабильно установлена рука робота, представляющая «монолит с платформой», а также рабочая поверхность для другого устройства, взаимодействующего с роботом на одной плоскости. Общая рабочая поверхность в виде стальной плиты большой массы или стальной платформы устанавливается на пневматических виброизоляторах с электронной стабилизацией положения EPN. Контроллер положения платформы управляется в реальном времени с помощью электронных сенсоров.

Для переменных нагрузок и высокой скорости перемещения масс предусмотрен вариант активной системы пневматических подушек и контроллера EPPC (ссылка на продукт EPPC). Контроллер отвечает за управление потоком воздуха в соответствии с заданными параметрами.
Данное решение совместимо с устройствами известных производителей, таких как KUKA, ABB или FANUC.
Ten post dostępny jest także w języku:
![]() Polski (Польский)
Polski (Польский) ![]() Lietuvių (Литовский)
Lietuvių (Литовский) ![]() Eesti (Эстонский)
Eesti (Эстонский) ![]() Latviešu (латышский)
Latviešu (латышский) ![]() Українська (Украинский)
Українська (Украинский) ![]() Belarussian
Belarussian